|
68008 computer (68kavr) by DtZ
Note the Russian Spelling of Blya-Blya-Blya!
Preface
Aim: AVR-booted 68008 SBC with CP/M 68 (yes, I've read
https://sites.google.com/site/libby8dev/libby8/concept and know that idea)
Work in progress! (but mainly complete)
The place where I bought 68008 at Feb'2014
(they are (M) chips made in 1995/6) (now (Dec 2017) unavailable)
Board photos:
| 20140118 | 20140325 |

|

|
Photos 201412 (Start of epoch II)
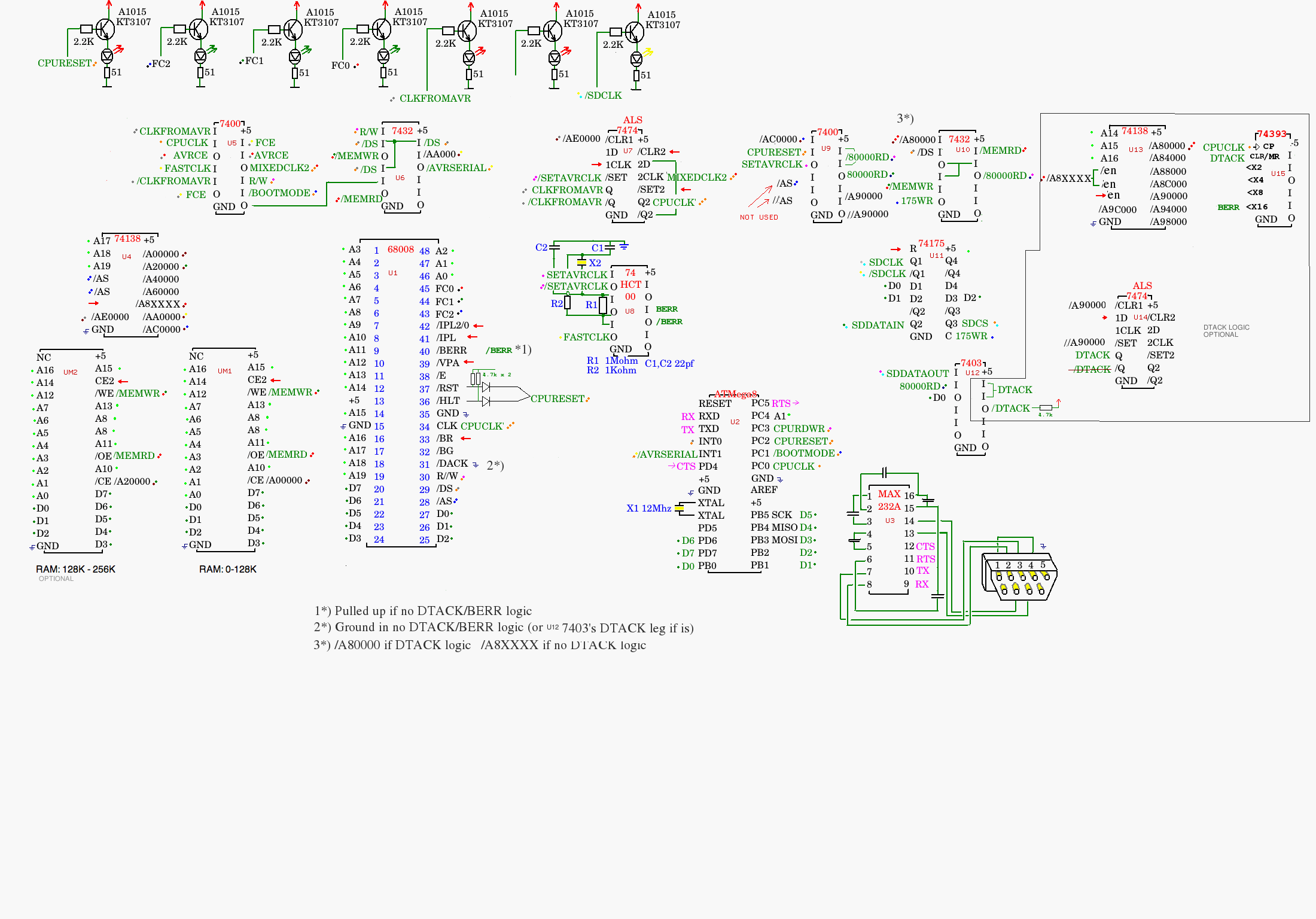
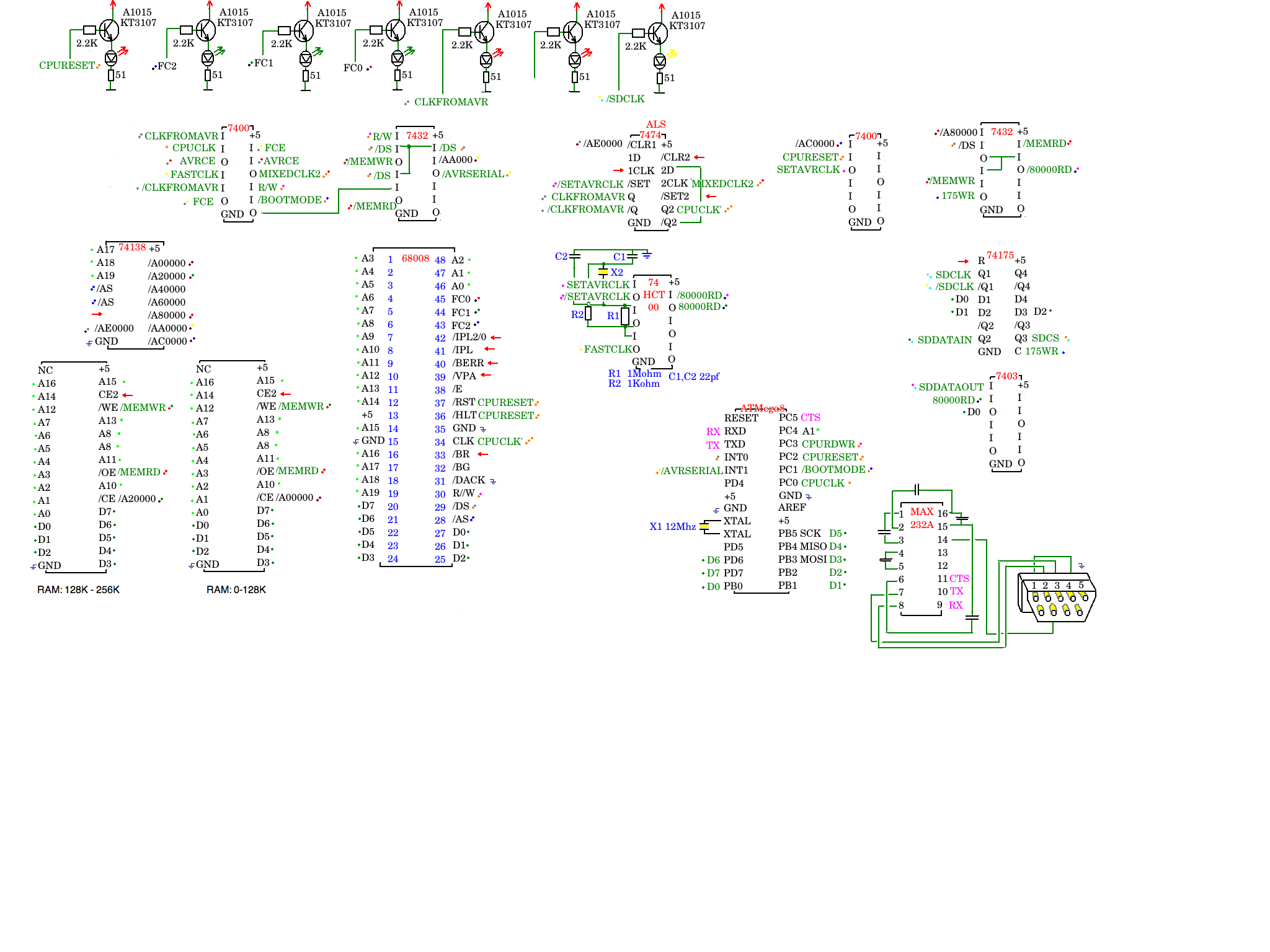
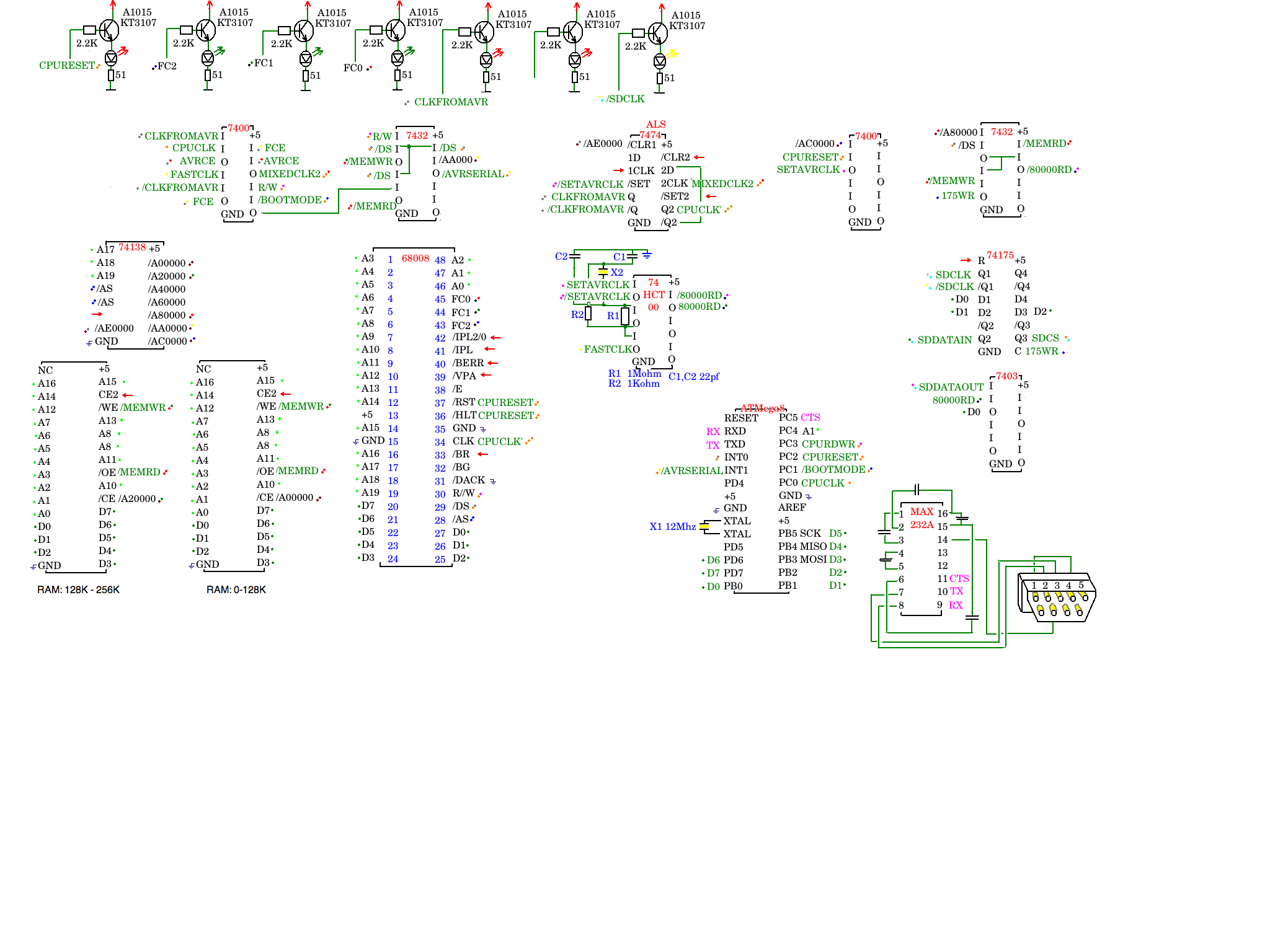
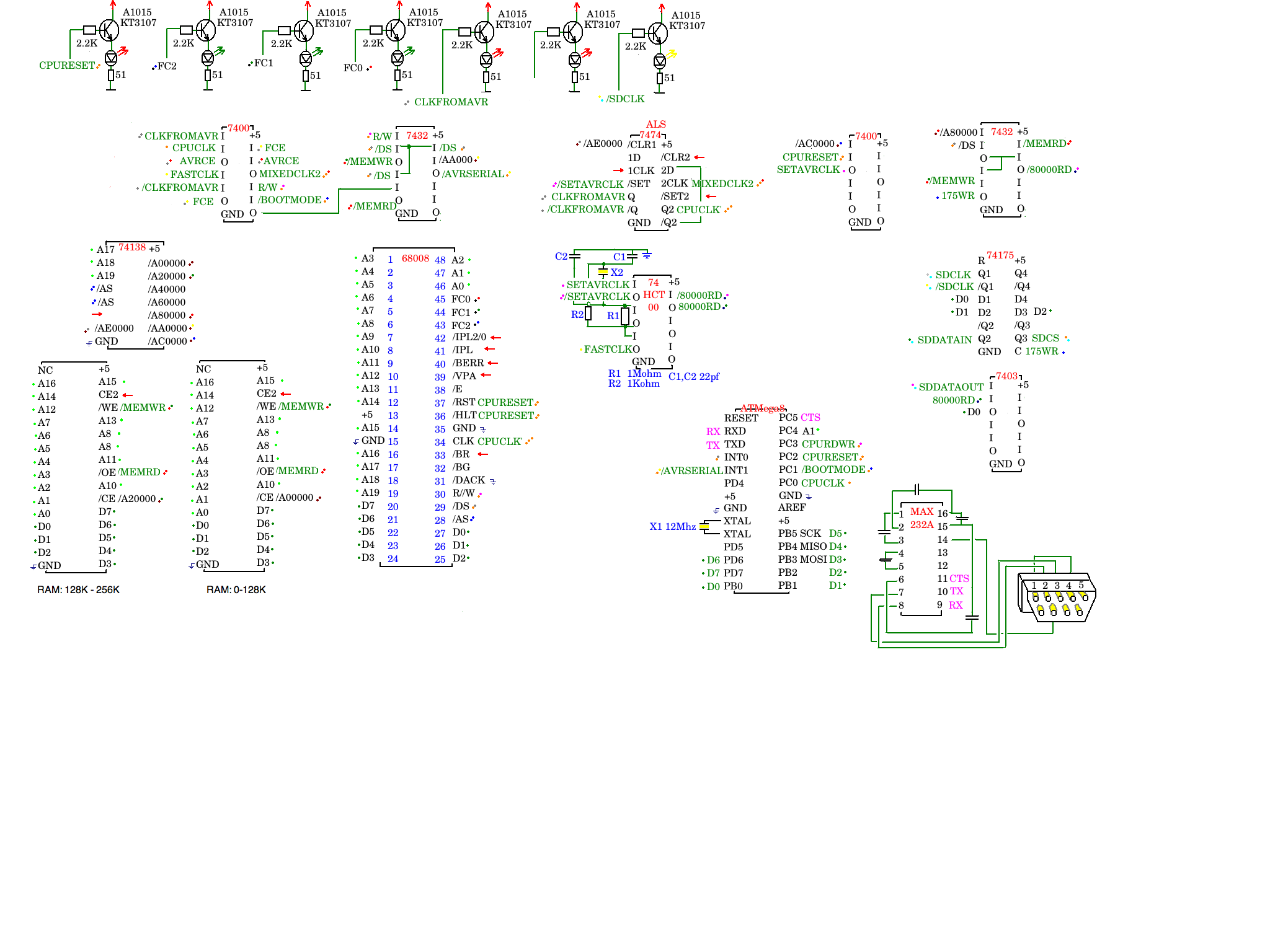
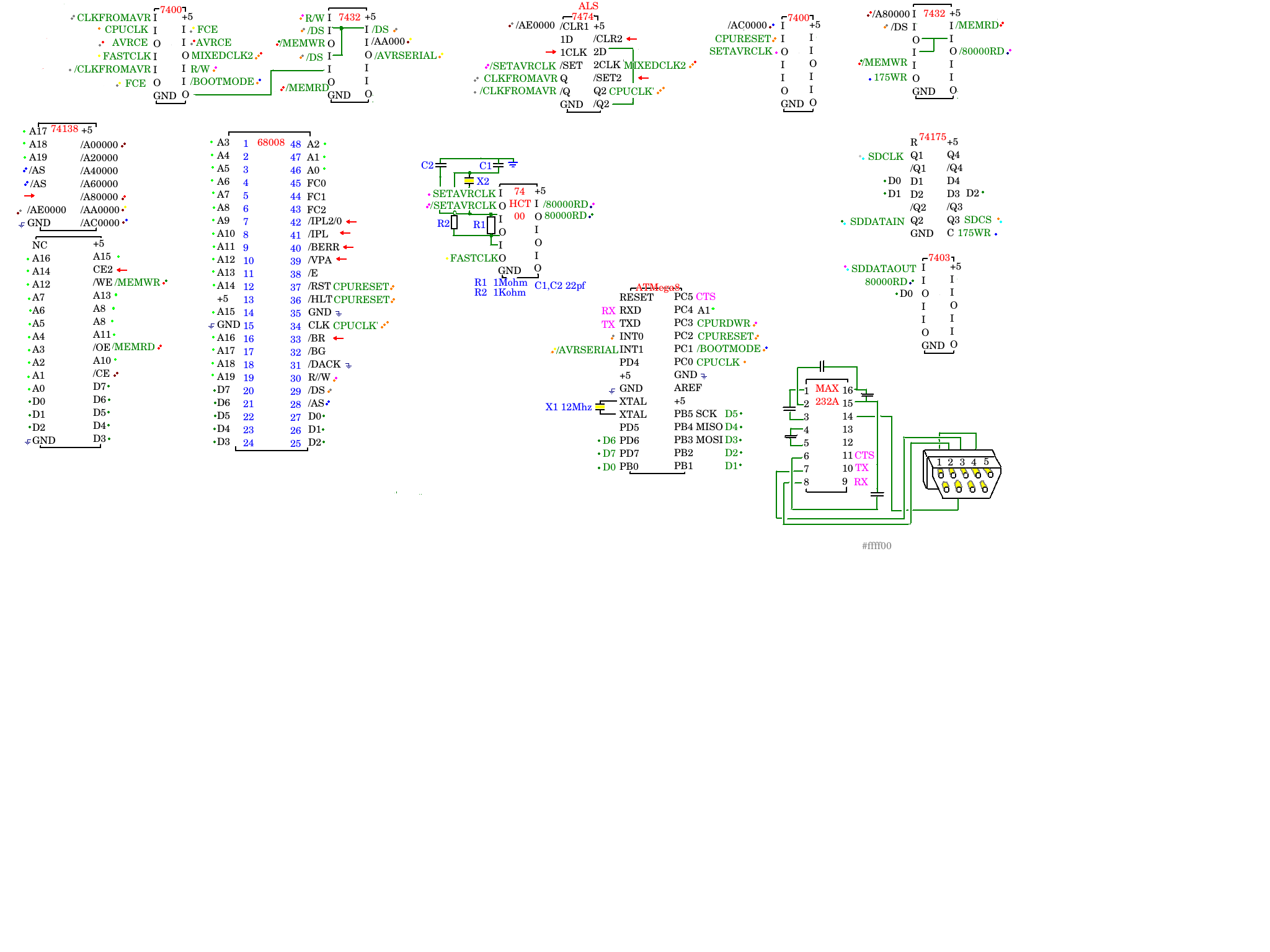
Current full scheme here (updated 20150127)
(Changes with 2501.png:C3,C4 added
(Changes with 24b3.png: CTS/RTS changes, DTACK logic shown)
(changes with 24b2.png: DB5 to ground shown)
(changes with 24b1.png : 7475's trigger RST leg now shown to be at +5)
I need yours feedback. I know only one person (in USA) who dared to build that (using Arduino instead plain ATmega8).
Write to dreadbit@gmail.com
20140108
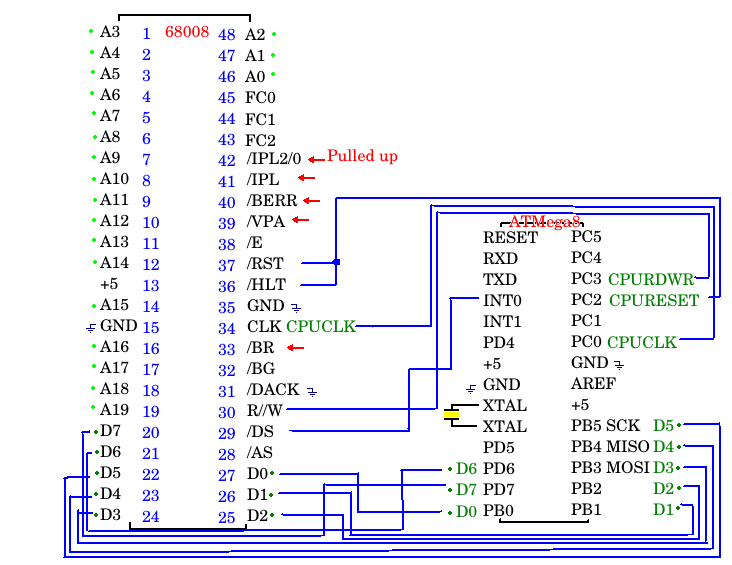
Getting Reset, AVR (MCU) lowers RESET+HALT of 68008 (CPU) and begins to click
clocks in main loop, which leads to the state called Boot Mode and raises
CPU's RESET+HALT some clicks after that.
Getting falling font of DS the MCU's INT0 is accrued; while serving INT, main
program waits until INT0 finished, so clock does not click, and there is no reason to play DTACK
UPD 20160101: It's not so in case of EC000. It hates this sort of low freqs.
You cannot step-by-step debug it this way. While it loads from ATmega, it's unable
to fall down where you print all that debug stuff via serial. So you have to
play DTACK with EC000, and that's not as easy, but is easy, anyway
INT0 feeds next byte of program to the CPU data bus (if CPU reads it), and leaves it there, returning
from INT0 handler and making the main clock clicks.
When main loop detects that DS is not active, it removes data from data bus.
So here it is:
/* Interrupt handling - DS gone low */
void ISR0()
{
if (RWline is UP) {
/* feed a byte to CPU */
writing_on_bus = 1;
write_on_bus(bytefeeder());
} else {
/* CPU is writing byte */
}
}
void main()
{
bootmode = 1;
reset_CPU(); reset_ticks = RESET_TICKS_VAL;
install_int0_handler(DS_line_does_down);
while(1)
{
click_clock();
/* may be some minimal delay, but CPU should be much faster then MCU*/
if (reset_ticks > 0)
{
if (!(reset_ticks--))
{
release_reset_CPU(); // reset - up!
}
}
if (DS_line_got_high)
{
if (writing_on_bus) {
switch_data_bus_to_read_mode();
writing_on_bus = 0;
}
}
}
}
While in boot mode, CPU should transfer some initial program to memory,
then MCU should leave boot mode and send reset. After reset, CPU should execute the
main program already in RAM. It can later switch the clock source to run from a fast quartz.
20140116
Note 1. We have serial on ATmega, and you can use MAX232 or whatever you like
to connect it to COM port or USB.
UPD: Keep in mind I utilize hardware RTS/flow control later in this project; so I'm not sure USB
converters will do the job.
20150114 UPD: Later, in 2015, I utilize CTS signal also. In 2014 version I called RTS as 'CTS' (both
on the scheme and in AVR firmware), but it really, really was CTS signal, telling unix host side
to pause the transmission. Since 2015 (with versions above 2501) I call RTS signal, yes, RTS, and
also I mind CTS. The CTS processing is semi-clever: if in boot time CTS is high, I assume CTS
is not connected and ignore it. If it is low, I (you guessed) mind it, and pause the transmission
when it is high telling CPU 'not ready'.
Note 2. It is mentioned that interrupts are used to determine /DS signal. Generally,
you do not need that because while CPU is clocked from MCU they are fully synchronized
(and when CPU will be clocked from external source there will be no way to talk with MCU
because it is slow). AVR interrupts are used because the code is clearer.
Discuss it in blogger
20140108
The scheme for Running first program
The GCC source or AVR program
Warning! This file was updated at 20140416. It has a error - DEBUG was called
DEDUG in .h file
Note The quartz I use for AVR is 12Mhz quartz.
It can be 16Mhz [UPD: strange, I've tried and failed (!) [UPD2: because I should also
add two tiny capacitors around it!]] or like that
[should be configured in sources] (but not lower than 8Mhz - because the serial
speed I use is 38400; if you will be happy with 2400 you can even use internal
AVR clock and say that in AVR sources)
The result of running program:
(* is a clock tick , is a comment)
**********************************************************************************************[skipped]********
********************************************************************************************
Calling release reset
[Released reset]
**************************** clock after reset
INT: R Int happens when /DS goes low; R means that CPU is READING
State 0000***** "State 00" is some debug message, the other byte is actual byte
Releasing bus*** 5 clock changes /DS from low to high; 'Releasing bus' - MCU put data bus to high impedance.
INT: R
State 0000*****
Releasing bus***
INT: R
State 0000*****
Releasing bus***
INT: R
State 0008***** fed with 00000008; really the address does not matter, but it must be even, -
Releasing bus*** the first thing I've got was a trap leading write 14 bytes to somewhere
INT: R
State 0000*****
Releasing bus***
INT: R
State 0000*****
Releasing bus***
INT: R
State 0000*****
Releasing bus***
INT: R
State 00C0***** fed by stack pointer
Releasing bus***
INT: R
State 0020*****
Releasing bus***
INT: R
State 007C*****
Releasing bus*******
INT: R
State 0000*****
Releasing bus***
INT: R
State 0000*****
Releasing bus***
INT: R
State 0000*****
Releasing bus***
INT: R
State 0000***** fed with movea.l #0,A0
Releasing bus***
INT: R
State 0020*****
Releasing bus***
INT: R
State 003C*****
Releasing bus***
INT: R
State 00AA*****
Releasing bus***
INT: R
State 0055*****
Releasing bus***
INT: R
State 0033*****
Releasing bus***
INT: R
State 00CC***** fed with move.l #$aa5533cc,D0
Releasing bus***
INT: R
State 0020*****
Releasing bus***
INT: R
State 0080***** move.l D0,(A0)
Releasing bus***
INT: R
State 004E*****
Releasing bus***
INT: R
State 0071***** fed with NOP - that's prefetching
Releasing bus*****
INT: WAA******** Writing data! Whuuuuaaaaaauhuhhhh!
INT: W55********
INT: W33********
INT: WCC******
INT: R
State 004E*****
Releasing bus***
INT: R
State 0071*****
Releasing bus***
INT: R
State .....
So, we see that at least one command was executed by CPU
Discuss it in blogger
20140116
Well, to run program from RAM we should solder it in.
So, the Scheme 2:
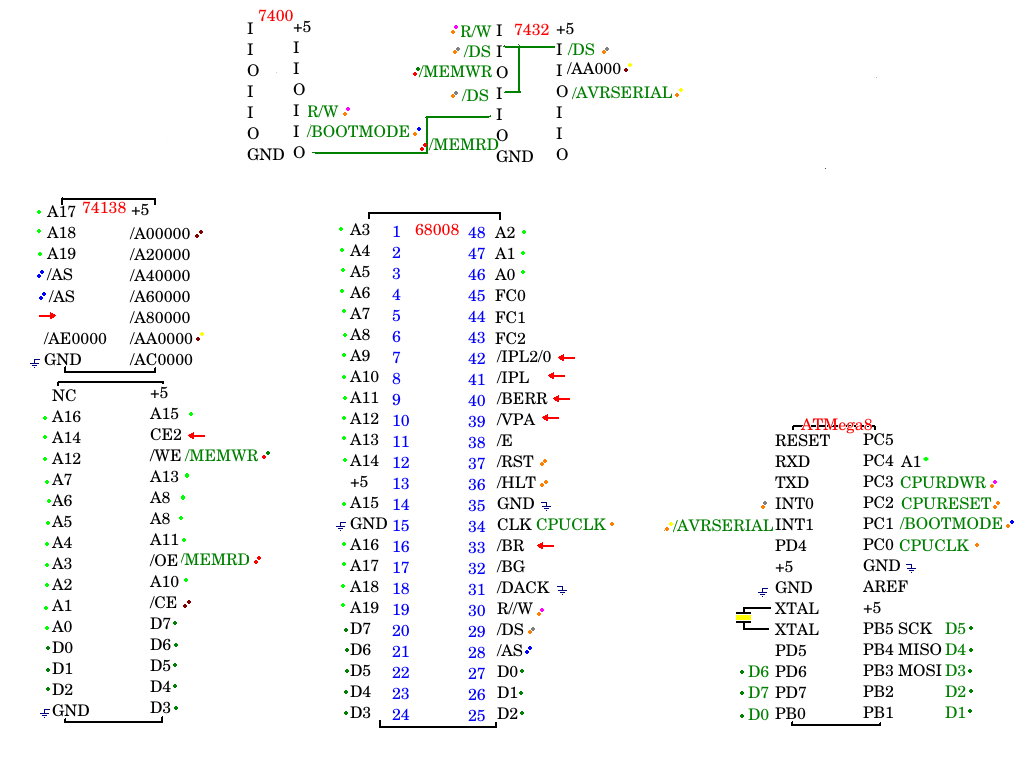
First, note the 74138. It decodes higher address lines. It's all clear with it.
Also, that it clear that RAM should start on Addr 0h, so put the /A0000 line to
/CE of RAM.
Look at Atmega. The most significant of the new connections is the /BOOTMODE line.
It is used to inform RAM to behave the following way: when /BOOTMODE is active, CPU
should read not from RAM, but from MCU. It is AND-NOTed with R/W, so when
/BOOTMODE is active (0) and READ(1) happens, the output of 7400 leg 8 is not active (high).
When /BOOTMODE is not active and READ goes high, the output of 7400/8 goes low, and,
ORed with /DS, this is fed (as /MEMRD) to /OE pin of RAM.
7432 also ORs /DS and R//W to get /MEMWR.
Sure, we'll use ATmega as uart, so we should connect one of the lines from 74138
(ORed with /DS) to one of ATmega's leg (again, as interrupt, while that's not
absolutely needed). And add an address line (A1) to get two registers for read and for write.
It's all clear that one pair is read byte from line and write byte to line, the
other read register is status saying "we have a byte in input" and "it's clear to
send the next char". The extra writing register is a HEX output.
(UPD 201506: do not rely on it, I've found much better idea - read and write the MCU's
NVRAM by CPU, but currently do not use it)
So here will be an algorithm (bold is new code):
/* Interrupt handling - DS gone low */
void ISR0()
{
if (RWline is UP) {
/* feed a byte to CPU */
writing_on_bus = 1;
b = bytefeeder();
if (b != -1)
{
write_on_bus(b);
} else { // The boot 68k program is ended!
bootmode = 0; /* and /BOOTMODE leg*/
reset_CPU();
reset_ticks = RESET_TICKS_VAL;
uninstall_IRQ_0_handler(); /* or you can leave it if you plan to look at data
bus transfers while debugging read/write from memory; in this case it [may]
conflict with serial IRQ */
}
} else {
/* CPU is writing byte to memory*/
}
}
void ISR2(USART_RXC_vect) // Serial event: a char came from terminal to AVR
{
byte_came = byte_from_serial();
byte_in_rx_que = 0x02; // Flag to be ORed when we'll tell CPU the status
}
void ISR1() // interrupt happened on /AVRSERAIL goes low
{
if (RWline is UP)
{
/* CPU is reading from serial */
writing_on_bus = 1;
if (A2_line_is_up) // CPU reads status
{
write_on_bus (clear_to_send | byte_in_rx_que);
} else
{
write_on_bus(byte_in_rx_que); // last recieved byte from serial
byte_in_rx_que = 0;
}
} else /*CPU is writing to bus*/
{
if (A2_line_is_up)
{
serial_send_hex(byte_from_data_bus());
} else
{
serial_send(byte_from_data_bus());
}
}
}
void main()
{
bootmode = 1; /* as well as /BOOTMODE leg */
byte_in_rx_que = 0; // No pending serial bytes
reset_CPU(); reset_ticks = RESET_TICKS_VAL;
install_int0_handler(DS_line_does_down);
install_int1_handler(AVRSERIAL_goes_down); // Both can be done when leaving bootmode
install_serial_rx_handler();
while(1)
{
click_clock();
if (reset_ticks > 0)
{
if (!(reset_ticks--))
{
release_reset_CPU(); // reset - up!
}
}
if (DS_line_got_high)
{
if (writing_on_bus) {
switch_data_bus_to_read_mode();
writing_on_bus = 0;
}
}
}
}
What do we feed to cpu, you may ask?
Here it is (in file bytefeeder.c):
uint8_t PROGMEM prologue[] = {
0x00,0x00,0x10,0x00 // 0 dc.l stack pointer
,0x00,0x00,0x00,0x08 // 0 dc.l start
,0x20,0x7C ,0x00,0x00,0x00,0x00 // 8 movea.l #0,A0
};
, then, in loop,
uint8_t PROGMEM program_loop_bytes[] = {
0x30, 0xFC, 0, 0, // move.w #XX,(A0)+
0x4e, 0x71 // NOP
};
, replacing zeroes by the bytes from the actual program. The trailing NOP is needed because
68008 prefetches one command before executing the prevous (as shown in Chapter II)
Note: In early versions of code there was a real NOP for every byte; later,
I was clever enough for only one NOP for whole program
And here are the tits is current photo of my board (20140118)
K1533LA3 = 74ALS00, K1533LL1 = 74ALS32, K555ID7 == 74LS138 (Soviet/russian chips)
The GCC source of AVR program for chapter III
discuss it in blogger
20140129
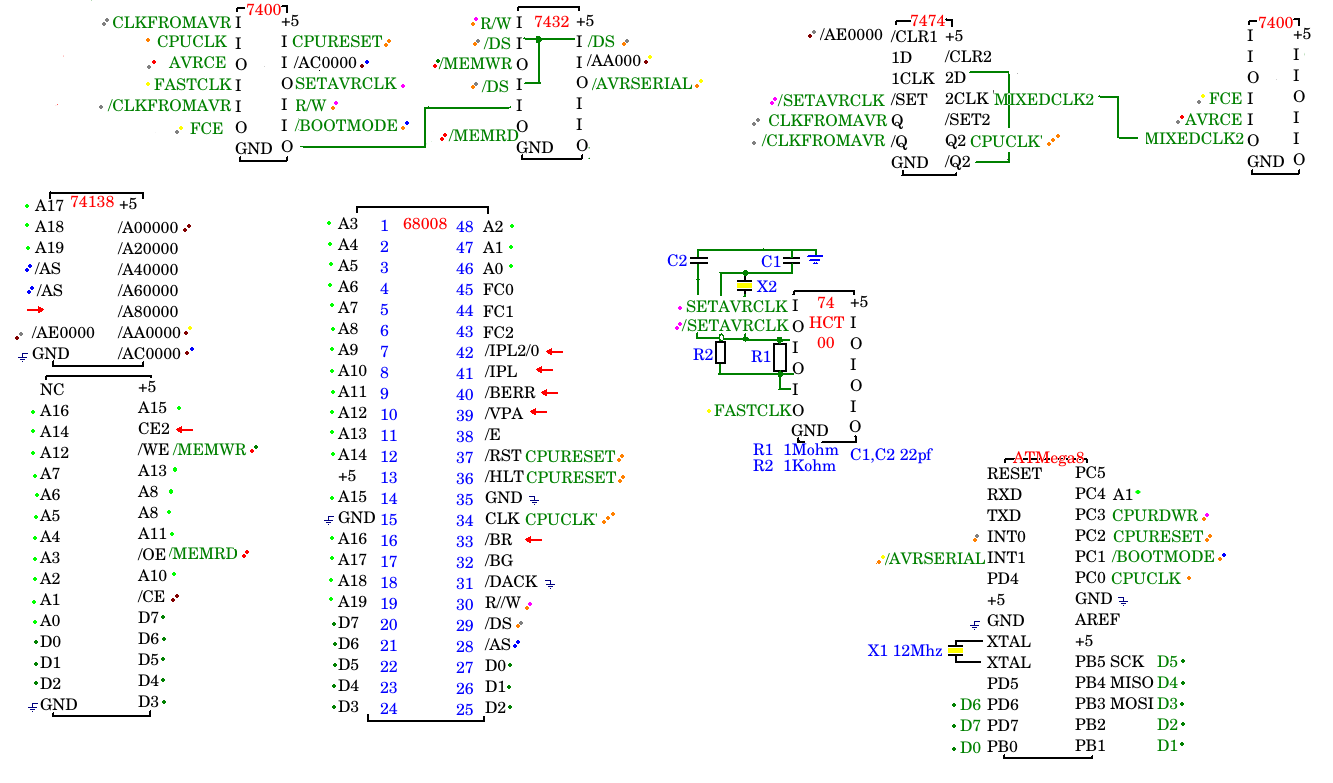
We will add fast clock. Just will, because our current CPU clock is slow. And for future 68681 UART which I am planning.
On my opinion, our AVR clock is about 60 times slower than external clock. (I run ATmega8A from 12Mhz crystal).
So lets' add an external quarts. (around 12 in my case; it will be divided by 2, read more). We will use
the Searle Grant's scheme on 74HCT04
and get FASTCLK signal pins 3,4,5,6.
And a flipflop - 7474 (should be ALS or HCT, but I've tried old 7474 and it worked too.)
The flipflop (1-7 pin) will behave the following manner: on reset, it will be at 1 (CLKFROMAVR high), and
by accessing E0000 address it will go low, that will be switching to fast clock. Also, by accessing C0000
from CPU you can switch it back to AVR clock. So we will mix /C0000 and /CPURESET signals on 7400, so
it will go high when any of /CPURESET and /C0000 will be active, and invert it on 74HCT00 pins 0 and 1.
Then, we'll take the flipflop output (CLOCKFROMAVR and /CLOCKFROMAVR) and mix it with CPUCLK on one segment
of 7400 and with FASTCLK. We'll get AVRCE (AVR Clock Enabled) and FCE (Fast Clock Enabled) signals.
When any of them disabled, it will go high, the other should tick. And let's mix them on one extra 7400
to get MIXEDCLK2
Is MIXEDCLK2 is good for clocking CPU? Maybe, I'm not sure.
Imagine you switch from AVR clock by accessing E0000, and fast clock front comes right after that?
That may be not good (because that will lead to a very fast clock tick) (or may not, because when you
switch the flipflop you are at the end of cycle)
So let's use the other side of the moon 7474 flipflop it to revert on any even clock change.
(And this divides clock by two.) I do not remember why I've decided that, but I really thought we'll have
one guaranteed tick in the worst case; it looks I'm wrong.
Anyway, this works ;-) (it really was an argument of doing it, but I forgot)
And unsolder CPUCLK clock from CPU and connect it to the output of that flipflop (called CPUCLK')
20140213 Well, here it the worst case this trigger prevents: imagine we switch the clock
from slow to fast, and the MIXEDCLK2 is high. And saying when switched to fast clock is low and
just before rising edge. So, the MIXEDCLK2 will go from high (from AVR) to low and back to high
too fast.
This is the case this trigger prevents.
Click to ENLARGE YOUR'S PEmy scheme
We've never discussed M68K assembler code; some code in examples, but now it's time to speak about it.
Currently I use A68K assembler [local] (not pila) to get binary output of program; it has $1D bytes prefix (is it
for HP calc?), so I cut it and translate the rest of binary to C code via bin2c.tcl script.
While what you see in the 68K code is very experimental (this is my first attempt to write 68K code),
at least here you can see an example (in byteio_fast.asm) file how to read and write bytes via AVR UART emulation
uartstat equ $A0002
uartdata equ $A0000
slowclock equ $C0000
fastclock equ $E0000
;------------------ RX char
rx_char:
bsr rx_notempt ; while rx is not empty, ie, no char
beq rx_char ; loop
move.b d0,(slowclock) ; switching clock slow
move.b (uartdata),d0 ; read from uart
move.b d0,(fastclock) ; switching clock fast
cmpi.b #CTRLC,d0 ; CTRL-C?
beq warm ; warm reset
rts
;------------------ Test input for a char (NOT ZERO if IS)
rx_notempt:
move.b d0,(slowclock) ; switching clock slow
move.b (uartstat),d0
move.b d0,(fastclock) ; switching clock fast
andi.b #$02,d0 ; bit 1 is 1? (I've told you that it is my first attempt to write 68k code!)
rts
;------------------ Wait for clear to send -------
tx_rdy_w:
move.l d0,-(sp)
tx_rdy_w1:
bsr tx_rdy
bne tx_rdy_w1
move.l (sp)+,d0
rts
;------------------ TX char
tx_char:
bsr tx_rdy_w
move.b d0,(slowclock) ; switching clock slow
move.b d0,(uartdata)
move.b d0,(fastclock) ; switching clock fast
rts
;----------------- Returns TX ready (Z)
tx_rdy:
move.b d0,(slowclock) ; switching clock slow
move.b (uartstat),d0
move.b d0,(fastclock) ; switching clock fast
andi.b #$01,d0
rts
The most interesting in this code is that it is working. I do not know what to tell you about this code,
may be the only thing: do not forget to switch the clock fast in yours main program
The GCC source of AVR program for chapter IV
Discuss in blogger
20140306
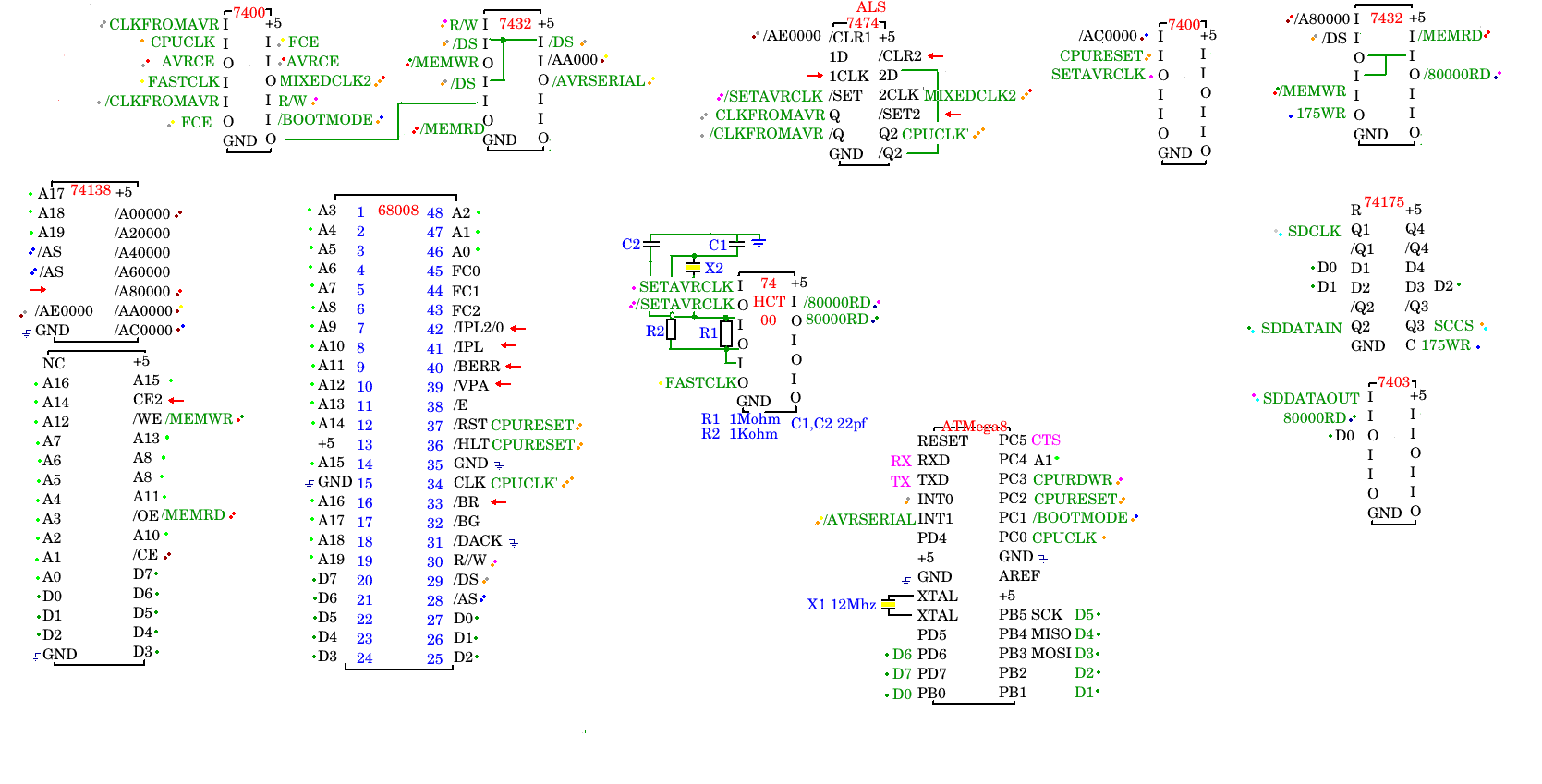
The idea of SD interface is just an adaptation of my SD interface for Searle's Grant SBC.
So go there for SD card pinout,
resistor values, 3.3V power, etc. The only change is 2*7474 to one 74175. Or you can use 2*7474. Or any latch of this
sort.
Some notes: a rewiring /AC0000,CPURESET->SETAVRCLK, FCE,AVRCE->MIXEDCLK2 on the scheme is not significant at all
and is here just to correspond my actual wiring.
As for SD interface, it consists of a 74175 trigger for data output and 7403 as data input. To write to
74175 we mix /A80000 line with /MEMWR and /DS (on an extra 7432) and latch D0-D2 to the trigger, so that are SD card's Clock (SDCLK),
DataIn (SDDATAIN) and Chip Select (SCCS) [why SCCS? Rename it to SDSC later] SPI lines. They should be mixed via resistors
to get 3.3V-alike signals (again, see this). Do not forget that SD card itself should be feed with +2.8 - +3.3V
so you can use 7833 or just a LED to drop the voltage.
For data in, we mix /A80000 line with /MEMRD and /DS to get /80000RD and invert it to get 80000RD. Passed throw
7403 (with SDDATAOUT) we direct this open-collector output to D0. So this output is low only when 80000RD is active (high)
and SDDATAOUT is high too, so this is inverted input.
So, from 68k side we can
move.b #7,$80000 ; CS - up, Dataout - up, CLK - up
move.b #2,$80000 ; CS - down, Dataout - up, CLK - down
manage that bits this way (but better keep higher bits high - we may have some extra SPI devices in future), and
to read it just read lower bit from $80000 and invert it.
Just to remind:
D0 - CLK
D1 - DATAOUT
D2 - CS
D3 and D4-D7 - reserved for future SPI devices (who knows which? extra Atmega, RTC, etc)
The Code for ChV can detect (command "BOOT") the card (CMD0), can send it CMD1 for (doing smth usefull),
some command to ensure the card's sector size is 512 bytes, but nothing more
still.
(I use this and
this) as reference)
Also, scince now I use Atmega's PC5 pin for CTS. That's because I've tried to cut-and-paste CP/M-68 S-record
files and was unable to do that without hardware flow. So in AVR code there is a #define WITH_CTS to use this code
(enabled by default) and 256 bytes ring boofer for handling input bytes from serial.
As you could note, there is a sort-of-monitor program included in 68k asm
Currently it can:
BF Blink SDCLK fast (with fullspeed clock)
BS Blink SDCLK slow (with AVRCLK)
BLINK Blink until key pressed (fullspeed clock)
ON Set SDCLK to 0 (or 1)
OFF Set SDCLK to 0 (or 1)
1 Set SDCLK to 1, SDDATAIN to 0, SCCS to 0)
2 Set SDCLK to 0, SDDATAIN to 1, SCCS to 0)
4 Set SDCLK to 0, SDDATAIN to 0, SCCS to 1)
IN Tell SDDATAOUT status (or inverted SDDATAOUT?)
DUMP[optional address] Dump memory from address (or continue to dump from that address if
no address given)
BOOT Try to init the SD card
S[srecord] Parce S-Records. It understands S1,S2,S3 records and ignores all the others
It's easy to extend this command set:
first, write an f_myfunc subrotine which should return to monitor with rts.
Then add it's mnemonic to commands: and it's address (f_myfunc) to commands_vector
When called, A1 will point to the first byte after you's command mnemonic in input buffer, so if was called as
myfuncbebebe
, A1 will point to "bebebe"
Also there is one more thing I want to warn you: I use ISP programming of ATmega via SCLK/MOSI/MISO/RESET pins
of ATmega, AND THIS IS UNRELATED TO SPI BUS WE'VE JUST DISCUSSED!
Be careful: I've burned 3 Atmega's while ISP programming it until I installed a RESET switch for CPU (RESET+HALT)
So to make an ISP firmware update, hold down RESET+HALT of CPU, then do firmware update (I use avrdude and usbasp)
20140325
Some news of the project:
The updated scheme
Here. Generally nothing new, only
MAX232A is drawn
Here is the picture of my board taken 20140325
First, I have some minor (but nice!) changes in my firmware. First is
GOaddressmonitor command , which goes to the specified address.
And the second... (have I ever told you I'm genius? REALLY? Oh, sorry) - I catch the BREAK from
a serial line and inititate CPU Reset! (actually, even MCU reset).
So, in C-Kermit> (if you use C-Kermit as do I) 's terminal mode, I can press
[CTRL]+[\] [B] , and
get a reset!
More, I own an HP 9000 A500 server and it has as "Service Processor". And I'd like to have a full
Service Processor console in future like the one on that server. Saying, it can turn on and off
ATX power (if I have a spare pin and free memory on Atmega8).... Sometimes in future
So, let's talk about CP/M iteself
This is my first attempt to port CP/M to any computer by the method explained in, our case,
"System Guide".
The prerequestings are:
- I should have System Guide (I do)
- I should have CP/M 68 in S-records (I do from http://www.cpm.z80.de/binary.html : I use
this)
- The system must accept S-Records (my does)
- I must have an assembler which generates S-Records (I use A68k from TI 68K calculator project:
[local]
68000 Assembler - version 2.71.F3s (Sep 21, 2004)
Copyright 1985 by Brian R. Anderson
AmigaDOS conversion copyright 1991 by Charlie Gibbs.
Adapted for use with Fargo by David Ellsworth.
Bugfixes and additions by Julien Muchembled, Paul Froissart and Kevin Kofler
Warning: do not use asm68k
asmx multi-assembler version 2.0b5
Copyright 1998-2007 Bruce Tomlin
- buggy as shit. May be vasm is good - but I'm not ready to write linker scripts just to get SRecord from
the source with static lables and given ORG)
So, on the CP/M distribution there is a file CPM15000.SR - that's an CP/M in S-Records (which is
loaded from address $15000).
On the first disk of distribution set there is a very useful README.TXT which says
that to create a BIOS I should figure out _init (== ORG of BIOS == $1B000) and
_ccp ($150BC) symbols in CPM15000.MAP (and that differs from what is
written in "System Guide"; there said you should patch Srecords file [for 1.0 and 1.1 CP/M 68k vers.]).
So lets go to "System Guide" directly to the Appendix B on page 59 and start type
"Sample Bios" into text editor.
As you can see, BIOS install TRAP #3 and CP/M works with BIOS via this TRAP.
I've tried to start with setexc also a must for CP/M to show you
it's A:>. The first thing it does, it installs an TRAP handlers for almost all the TRAPS!
I will not retype it here, that will be attached later, when it will be at least read/write sectors.
To start CP/M first load CP/M itself, then BIOS, then type go15000
After I wrote basic sector read/write access I was able to say DIR,TYPE and even REN. But could not run any
program, that's because I've forgot getseg call at all. And then I was able to run DDT68000,
but during read it complained "Cannot write sector" (and it was not writing sector at
all!).
That was because I forgot flush call.
Funny - this code contains *No* CP/M specific code yet, and is just update of firmware ;-)
Code for ChVI
Discuss in blogger
20140409
Ok, lets start from code. Code for ChVII
The firmware is mostly [or exactly?] the same, but there are two new directories - BIOS ,which
contains BIOS (sort of ugly bios), and Disk,
which contains pretty empty disk image and diskdefs for cpmtools.
(local)
The
disk image itself contains A: - P: drives, cpmtools with this diskdefs
are able to write to A: . Write there a whole CP/M distribution.
The disk image comes from Searle Grant's Z80 SBC,
(or even my mentioned SD interface for it) as all the DPB stuff.
For the bios reassembly use assemble script, you'll get bios.s.
Next, load it and CPM15000.SR via cut-and-paste to SBC console.
Personally I do it with kermit. It's much
better for our use then saying minicom.
Here is my kermit initialization (I hope I forgot nothing:)
set line /dev/ttyS0
set car off
set speed 38400
set flow rts
set transmit timeout 10
(and set input echo on, but I forgot what it is for and if it is really needed)
So from SBC prompt say
* boot
, it will initialise the card and
load something ($2000 bytes?) to somewhere ($1000?). But currently we do not care.
UPD: Yes, it loads 16K to $1000. But after 0.00.01 release
(or what's forthcoming for 201409? that will be changed: it will load to
$8000 with stack at $2000; before that release, stack in $FFE)
Next, load bios.s and CPM15000.SR by
C-Kermit> transmit CPM15000.SR
and
C-Kermit> transmit bios.s
Next, run it via go15000 and get A:.
The next thing is to create CPMLDR and CPM.SYS.
Sure, we will create them on the board. But I refuse to learn CP/M ed!
So, the next thing I'm going to do is to get some text editor. And that will be separate chapter or two.
(UPD 20140520 In this wonderful
David Schultz's CP/M 68K simulator a *working* vt100 emacs included; the simulator is very useful itself, too;
so currently I gave up porting both Terry McConnell's deadlin and FreeDos's edlin)
Some things to mention:
- First, get .68K files from .REL . That's done by series of
RELOCX.SUB
scripts
- if AS68 says
can't open 0:AS68SYMB.DAT, ensure you have AS68INIT from DISK3 and run
AS68 -I AS68INIT for every TPA change (or system relocation; look at Programmers Guide)
-
http://forums.debian.net/viewtopic.php?f=16&t=112244" A very good article how to
recalculate DPBs into cpmtools diskdefs.
It does not help me much because it is long and
clever; I always guess some things (and probably wrong)
- On Solaris/Sparc I access the disk with cpmtools like that:
/usr/local/bin/cpmls -f sga /vol/dev/dsk/c2t0d0/unknown_format
20140424
So, currently we have a board which can be loaded with CP/M, we have C compiler there, and
out aim is to build CPM.SYS and CPMLDR.SYS.
In this point I had to transfer some files without pluggin SD card off the system; that's why
I got some UUDECODE program
(C source and .68K on disk B:), and
able to transmit uuencoded files there. That's not too fast, but quite good for transferring
sources.
So I have to assemble the source of my bios.asm file on the board. Here what to be done:
- Add some more assembly conditions -
AS_SRECORD, AS_CPMLDR_BIOS
- Replace my long labels like
write_sector_loop_2_exit_ok: to
the 8 chars lables like WRSL2E1:
- Convert file to CP/M style text(add ^Ms and ^Z)
- replace comments starting with
; to *
So, I use Linux/GCC's cpp to replace labels.
20140520
To do it, I wrote defs.h which should be
#included in the beginning of bios.asm. Also,
edit include "dph.asm" to became #include "dph.h" and run it via cpp
and then transfer it into SBC's disk
Hopefuly, I've done it all and included the whole disk image. To boot it, first say
* boot
it will load first 16k of disk to $1000 , then
* go1080
First $80 bytes are useless in our case, the linker just appends something there, but we do not care.
To regenerate system follow the System Guide (the system is
$18000 based; do not forget to mention memrgn) ; also, there is readme for whole
the disk and readme on disk b:; there is mkldr.sub which should run from disk c: - that's
linker batch to generate cpmldr.sys.
After you get it, XPUTBOOT b:CPMLDR.SYS A: - and you'll get the bootable media. I use
distributed xputboot because I'm lazy to rewrite it;
so I linked and wrote the cpmldr.sys
and watched what I've got - and $1080 was the starting address. Why not?
20141027 Also there on disk B: you can find the source for SDHC versions of
BIOS and Loader BIOS; as the main (SD) BIOS and LDRBIOS they are made from
bios.asm unix file, the only difference are the defines. The
problem is that I cannot edit them on board with emacs - it has not enough
memory.
CPMTOOLS Diskdefs for the disk is
diskdef sga
seclen 512
tracks 512
sectrk 32
blocksize 4096
maxdir 512
boottrk 1
os 2.2
end
On Solaris/Sparc I access the disk with cpmtools like that:
/usr/local/bin/cpmls -f sga /vol/dev/dsk/c2t0d0/unknown_format
, on Linux just like /dev/sdb
Code for ChVIII, with disk image included
(Is that's all? I cannot believe that!)
Those plans are visible in some future
- CP/M : disk deblocking (because disk write is TERRIBLY SLOW!)
- CP/M : make a bios call and simple command (like
diskmap i: 21[map disk i: to be 21th disk])
to map disks. We still use only 128M of our 2G cards.
- TOS/M, EmutOS (I've never seen it)
- Hardware : Atmega based advanced (cause we already have basic - we can reset it!) LOM; so, maybe move
to Atmega328 or Atmega168
- Hardware : use of Atmega's NVRAM, sort of environment maybe
- Hardware : IDE drive (not CF - we hate each other)
- Hardware : MC68681 (or smth else), interrupt driven, sure
Those are secret invisible plans
- MC68008 powered manned Europa flight
Any my future experience will be added in this chapter
20140707
Oh yes, gkermit for CP/M 68
[local] works nicely, the only thing to mind - do not forget to
set sending block size to saying 64 bytes and convince unix side kermit not to
turn on streaming. (or maybe it's my problem; looks like my unix side ignores RTS(!); the maximum
I get out of it is 114 CPS)
When I tried to recompile it, I found that stty.h is missing in CP/M 68K 1.3;
author (George Harvey) of GKermit port for CP/M-68 says it is really missing and should be looked at
1.2 release (or even 1.1)
Also, keep in mind that it thinks of CP/M 68 side as "unix kermit", so it does not automatically
translate text files
20141113 Adding memory up to 512k is easy. I added
extra 128K today - so I have 256K today.
20141209
During summer of 2014 I was carving backplane like a timble beetle, and I did it! (see the fotos on
top of this document). So the first thing
I've implemented is change the CPU to CPU board with MC68EC000 (also I could use MC68HC001) - both of
these chips has 8-bit data bus mode (and SEC000 is currently in production by FreeScale). The thing EC
lacks is 6800 signals; but I do not care, because I never plan to use MC6850 chip (is there a reason
to use some other 6800 family chip? [except MC6809, but not in this project], and MC68008 lacks some
signal of 6800 interface, too (well, it can, but it takes some more glue logic).
Generally it just plugs: I currently use only A0-A19 address lines (but I have an idea
to change it), I ground MODE leg (==set data bus to 8 bit), and used /LDS as /DS signal (because of
8 bit bus, according docs)
Know what? It ran from the first try!
My MC68008 is 10Mhz (but I ran it from 16Mhz/2 = 8Mhz [but it known to run at 10Mhz]), my MC68EC000 is 12 Mhz,
but in the time of writing it runs on 20Mhz/2 = 10Mhz. I hope I'll get 24Mhz quartz in a few days
and 68EC000@20Mhz in a two weeks. Also I expect some fast memory to arrive.
The part that I had to change is 74ALS74 (which generates MixedCLK2 signal) to 74ACT74 (I do not
know what exactly it is, but I was told that it's "All better than soviet K1533TM2 (==ALS74)") - it lost some
clocks in multiboard configuration.
I still not absolutely sure it's all right with the boards [mostly with contacts], but
most of the time they work all together, so generally the idea is working.
Also I added one more quartz (fail-safe 16Mhz and full-speed [currently 20Mhz]), selectable
via jumpers.
So, what I've told about future plans? Looks like they may come true!
Naming for releases
68kavrYYMR
\ / \/
------ > project name, 68kavr
YY Year, 1990 based (DtZ's tradition; 24 for 2014)
M Month - '1' for jan, '9' for Sep, 'b' for Nov
R Release this month
- 20150608
0.00.02/2560 Release
An incremental release, lacking boot disk images and requiring you to
recompile/relink everything. Take 24A0 and upgrade it here.
I'm lazy to make a full release because today is summer in Russia and I prefer to ride my bicycle.
But really a lot of changes. Autoboot works. Some serial/avr stuff fixed. 68681 code. And a lot of
new interesting words in Changelog.
- 20141127
0.00.01/24A3 Release
(but really should be named 24B0). Bugfixed 24A0.
- 20141023
0.00.01/24A0 Release
SHDC
support. Separate disk images for SD/SDHC, common boot code. All my SD cards
are working, some of my SDHC does not (even detected properly)
Contains bugs fixed in 24A3. (looks like:
W: Cannot read write sector first tries to read physical sector
R: Cannot read
The quickfix was
move.w #$80#$7FFF,d4 ; and now just wait for **NOT!!** 0
writefinl2:
move.l d5,-(sp) ;DELETE THIS PUSH?
move.l d4,-(sp) ;DELETE THIS PUSH?
; bsr sd_read_byte
IFNE SD_WRITE_DEBUG
bsr sd_read_byte_debug ; will return in D0
ENDC
IFEQ SD_WRITE_DEBUG
bsr sd_read_byte ; will return in D0
ENDC
move.l (sp)+,d4 ; DELETE THIS POP?
move.l (sp)+,d5 ; DELETE THIS POP?
cmpi.b #0,d0 ; "Non zero byte to be returned"!
beqbne write_ok ; 20141122 was beq!
dbra d4,writefinl2
Affects both SD and SDHC.
- 20140928
Since that moment, firmware stack is moved to $1FFE (from $FFE), boot
command loads first 16K of disk not to $1000, but $8000, so to start CP/M
you should type GO8080 (that's not a joke! ;-) )
- 201405
Currently code for Chapter VIII
is considered to be current release (0.00.00/2450).

| Flag counter for 68kavr Epoch I only |
|
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}